
La integración de robots colaborativos en entornos industriales ha crecido significativamente, y con ello, la necesidad de garantizar la seguridad de los trabajadores que comparten el espacio de trabajo con estos robots. La guía «Guía rápida de compra, instalación y puesta en servicio de un robot colaborativo» del Instituto Nacional de Seguridad y Salud en el Trabajo (INSST) aborda este tema, destacando los cuatro métodos básicos de funcionamiento colaborativo descritos en la especificación técnica ISO/TS 15066: parada supervisada de seguridad, guiado manual, supervisión de velocidad y distancia de separación, y limitación de potencia y fuerza. Entre estos, la parada supervisada de seguridad es un método crucial para prevenir accidentes cuando los trabajadores interactúan con robots en espacios colaborativos.
El método de parada supervisada de seguridad se activa para detener el movimiento del robot cuando una persona ingresa al espacio de trabajo colaborativo. Según la guía del INSST, mientras el trabajador permanece fuera del área de trabajo (identificada en rojo), el robot realiza sus tareas programadas con normalidad. Sin embargo, si el trabajador entra en esta zona, el sistema detecta su presencia y ejecuta una parada supervisada de seguridad, deteniendo el robot para evitar cualquier contacto o accidente. Esta parada se mantiene hasta que el trabajador sale del espacio colaborativo, momento en el cual el robot reanuda sus actividades automáticamente.
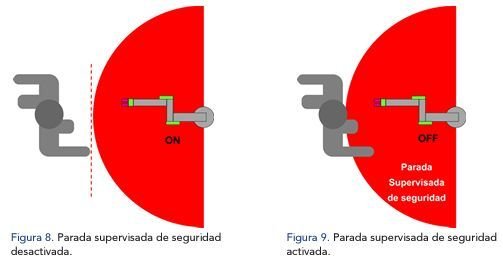
Este método requiere la conexión con dispositivos de seguridad externos, como escáneres, barreras inmateriales o cámaras, que garantizan la detección precisa de cualquier persona que ingrese al área peligrosa. Es importante destacar que, a pesar de ser un método básico de funcionamiento colaborativo, no permite la interacción directa entre la persona y el robot, ya que la presencia humana en el área de trabajo provoca la detención inmediata del robot.
La parada supervisada de seguridad, como se detalla en la norma UNE-EN ISO 10218-2, es una medida esencial para la protección de los trabajadores en entornos donde se utilizan robots colaborativos. Aunque no facilita la interacción directa entre humanos y robots, este método asegura que cualquier incursión en el espacio de trabajo del robot resulte en una parada inmediata, eliminando el riesgo de contacto accidental. Este enfoque contribuye a mantener un entorno de trabajo seguro, minimizando los riesgos asociados con la robótica colaborativa en la industria.

- Mantenimiento postergado causa el 85% de fallas en motores industriales críticos - 19 marzo, 2026
- Cuatro errores frecuentes en la auditoría de contratistas mineros - 19 marzo, 2026
- ¿Cómo proteger las herramientas más valiosas de la industria? - 10 marzo, 2026
Deja una respuesta